Droneload
Development of an autonomous quadcopter for object detection, navigation, and delivery tasks.
Project Overview
- When
- 02/2023 – 06/2025
- Duration
- 28 months
- Context
- CentraleSupélec
- Stack & Skills
-
Embedded systems Robotics Computer vision Python
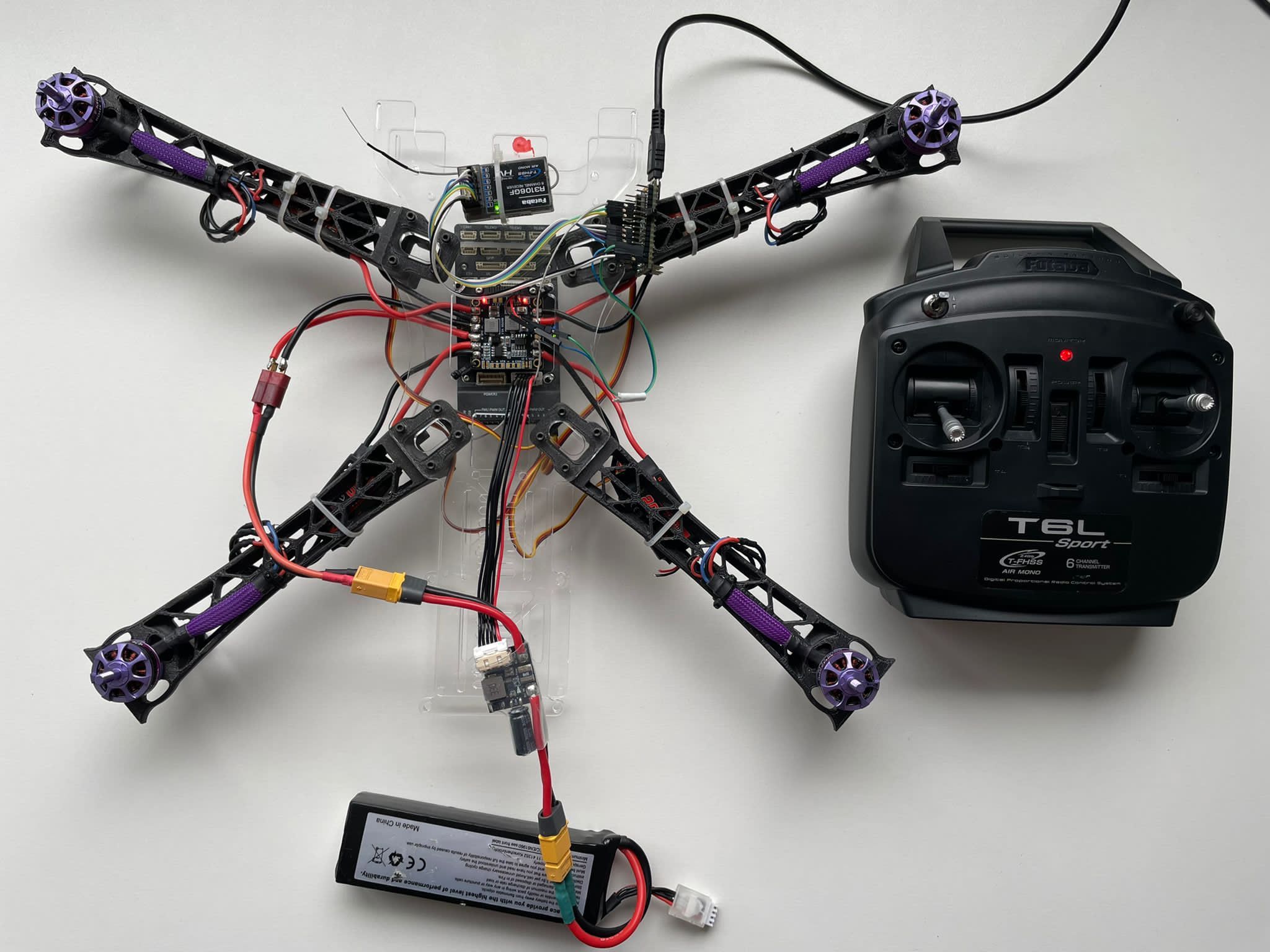
DroneLoad is an autonomous quadcopter developed at CentraleSupélec for the national Planète Science / Safran competition, which simulates Paris 2024 Olympics delivery missions through tunnels and windows. I contributed to the mechanical integration : a custom 3D-printed frame carrying a Jetson Nano, a PixHawk 6X, a RealSense depth camera, and lidar/ultrasonic sensors, alongside the perception and simulation software. The onboard computer runs color segmentation and a convolutional network trained on competition objects, while Python and MAVSDK handle communication with the flight controller and the Gazebo simulator. A polynomial path-planning algorithm generates smooth 3D trajectories through windows. Hardware failures limited full in-flight validation, but reliable object detection and preliminary autonomous behaviors were demonstrated in the lab.